The Aerobotics© (Aerial Robotics) Research Group at Monash, established in 1999, is interested in all aspects of the design, construction and application of UAVs. The Group's primary focus is on electrically powered aircraft however its research is also supported by more conventional aircraft particularly for long range applications. The importance of UAV developments is now well recognised. The potential for Australian researchers and SMEs will depend largely on Government policy.
Team Monash | Trials Archive | Selected Papers UAV 'Duigan' | UAV 'Lawrence Hargrave'
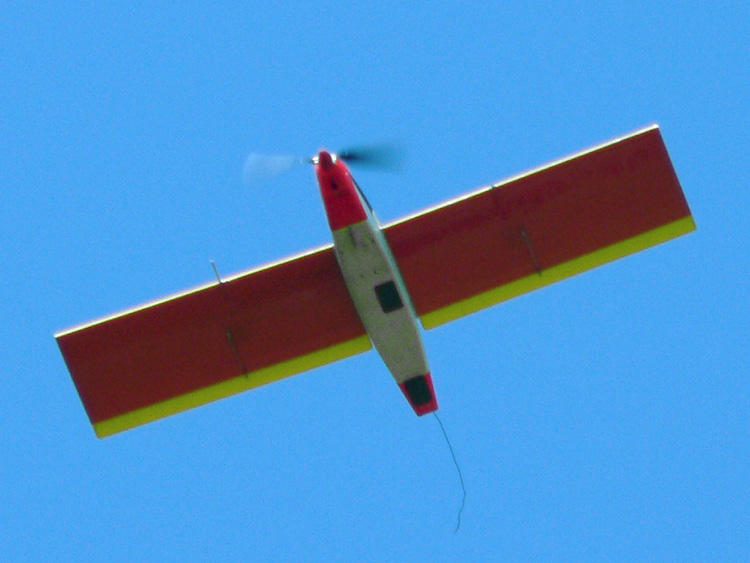
Photo: Ray Cooper Technical Specifications | Construction Gallery
20056-Feb-05Bairnsdale Airshow Monash University at the Airshow, Airshow Action and All Images Bairnsdale Airshow Air to Ground Video [MOV 5.1 Mb] shot from UAV P15035 UAV P15035 Parachute Trials Catapult Launch [MOV 1.4 Mb], Parachute Deployment [MOV 4.8 Mb]
200410-Nov-04Automomous Flight Croydon Aeromodellers Club Field, Yarra Valley
 P15035 ready for testing
 Builder and pilot Ray Cooper and P15035 set for launch
 P15035 Launched by Ray Cooper
 P15035 in autonomous flight
 Ray Cooper with Prof Greg Egan (seated) downloading flight data from P15035 after its autonomous flight More images to come
26-Jul-04
 Parachute Failsafe Deployment - Quicktime Video [6.2Mb] Video Frame Grab : Greg Egan
 Parachute Fitted into P15035 Video Frame Grab : Greg Egan
Micropilot First Flights Woodleigh
 Crew at Woodleigh - Quicktime Video [5.9Mb] L-R: Dr Andrew Price, Prof Greg Egan, Paul Jenkins and Ray Cooper Video Frame Grab : Greg Egan
 Crew at Woodleigh L-R: Paul Jenkins, Ray Cooper and Ian Reynolds Video Frame Grab : Greg Egan
P16025 Wing Alignment Brigg's Field
Assymetries in wing alignment can to lead to the aircraft strongly favouring one direction when forced into high angle of attack stalls. The higher aspect ration P16025 has a much stronger spin characteristic than the slightly broader chord and lower aspect ratio P15035.
2-May-04
 Ray Cooper and the business end of the P15035 Video Frame Grab : Greg Egan
10-Apr-04 The tests exposed the criticality of initial launch angle of attack when hand launching. Some damage was suffered by the aircraft before several succesful power-off glide tests were completed.
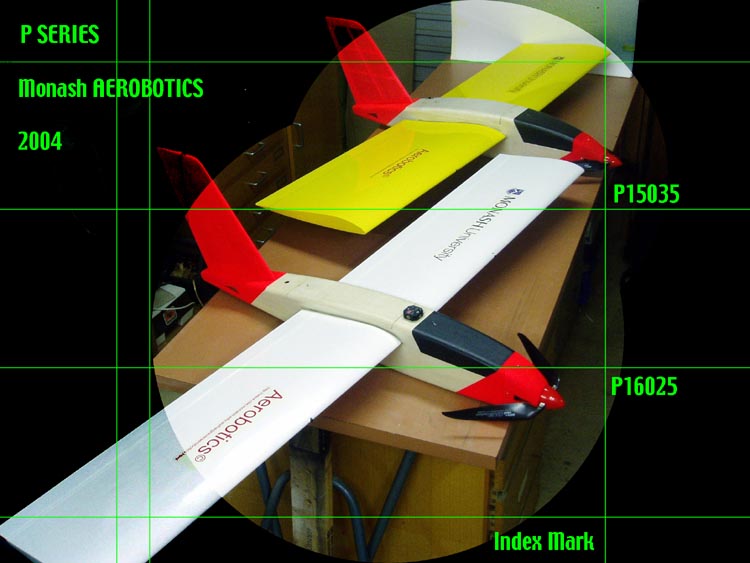
27-Mar-04 P16025 is a lighter variant of the P15035. The P16025 has a slightly higher aspect ratio and an extended range the tradeoff being lower payload capacity. The EMX07 airfoil used on the X wings exhibits a challenging pitch down at launch before the aircraft reaches flying speed.
21-Mar-04 Continuation of tests using a medium resolution (3Mpixels) still camera equipped with PAL live video link to ground. Camera for these trials triggered by R/C link.
14-Mar-04
Extension to earlier tests adding airspeed hold. Conditions at Kilcunda were extremely turbulent. Aircraft displayed good performance overall.
13-Feb-04 The endurance of the P923 soon to be redesignated to P15035 (150 cm span 35cm chord) was verified to be close to that predicted by the Group's favourite tool Motocalc.
4-Feb-04
"New" "Plank"" configuration with higher survivability for catapult launch and net capture landings. Aircraft based on designs flown by the Aerobotics Group since late 2001."
4-Feb-04
"Testing of altitude hold in combination with attitude control developed earlier. A variety of tight altitude control more suited for fuel aircraft and boost-glide options more suited to electrically powered aircraft. Control by altiotude select and turn on a single R/C control input ie. ""Bus Driver"" mode."
Specifications:
Span: 150 cm Construction: Fuselage is a simple box structure. Balsa sides and ply formers reinforced with glass cloth inside and out where required. Motor is soft mounted with rubber machine mounts. All control systems are mounted behind the wing trailing edge, this leaves room for the payload and motor battery to placed to obtain the correct CG. Wings are white styrene foam covered with 2 layers of 2 & 3 ounce glass cloth. Wing tubes for joiner rod are carbon fibre, the wing joining rod is also carbon fibre. Elevon servos are mounted in the wing. P16025 Specifications:
Span: 160 cm Construction: Fuselage is a simple box structure. Balsa sides and ply formers reinforced with glass cloth inside and out where required. Motor is soft mounted with rubber machine mounts. All control systems are mounted behind the wing trailing edge, this leaves room for the payload and motor battery to placed to obtain the CG. Wings are white styrene foam cover with Obechi veneer. Wing tubes for joiner rod are carbon fibre, the wing joining rod is also carbon fibre. Elevon servos are mounted in the wing.
200323-Nov-03State Flying Field Opening North of Sunbury Demonstration of the Monash sponsored telemetry used for Ray Cooper's Altitude Record Flight.
10-Nov-03
3-Nov-03 Testing the Monash telemetry links in support of Ray Cooper's World Altitude Record challenge. jump to the Trials Archive for 1999-2002
Researchers in the Group are mostly members of our Centre for Telecommunications and Information Engineering CTIE , and the Intelligent Robotics Research Centre IRRC. These centres receive substantial funding under Australian Federal Government Cooperative Research Centre CRC and Australian Research Council ARC programmes . The Group welcomes interest and collaborative research with other groups. All members of the Aerobotics© Group are either qualified RC model pilots or are in training to become so. This gives a strong reality check to our research and allows us to speak with some confidence regarding the relevance of our more theoretical studies. Monash University through the Aerobotics© Group administers UAV designated zone at Port Welshpool. The UAV zone established as part of a regional robotics facility proposal is one of only three in Australia, and the only one with clear access to the ocean. Agreements relating to access to the Royal Australian Air Force RAAF part of this zone are contained in a Memorandum of Understanding between Monash University, the Civil Aviation Safety Authority (CASA) and the RAAF. Our colleages at Lulea University in Sweden have access to the military test range. This large range is used for the testing of autonomous systems. Internet based telecommunications links between the two universities are well established including telelecturing and teleoperation of laboratories facilities. We plan to use these facilities for remotely administered UAV missions. The Aerobotics© Group is conscious of the contribution of Australian pioneers of flight who have in the past received less recognition than is deserved. We have therefore chosen to name our research aircraft after our pioneers with the blessing of their families. While the Group has a growing stable of aircraft we present here those that have been named - the 'Lawrence Hargrave' and the 'Duigan' Return to Menu
Monash University UAV 'Duigan' A new Monash designed UAV 'Duigan' is officially 'launched' by members of two very special Australian aviation families
L-R : Professor Greg Egan, Dick Hargrave, (great grand nephew of Photo : Dr Russell Naughton
 Monash University UAV 'Duigan' Photo : Dr Russell Naughton
The specifications of the Monash University UAV 'Duigan' are :
Wingspan: 3m Wing Area: 90dm2 Airfoil: MH62 Mass Empty: 5.5 kg Payload: 1 kg Engine: Direct drive Actro 40-6 Batteries: 30x3000mAH NiMH Airspeed: 55 KpH (Cruise) 100+ KpH (Max) Endurance: 45 min (Cruise) 15 min (Max) Read more about John and Reginald Duigan the creators of the first all Australian built aircraft to achieve controlled flight at Spring Plains Station, October 7, 1910 Return to Menu
Aerosonde/Monash University UAV 'Lawrence Hargrave''Lawrence Hargrave' is based on the #3 aircraft built by Aerosonde. The aircraft which is on loan from Aerosonde, has been adapted to suit our research programme. In this form it has significantly lower endurance than the 'production' Aerosonde which in 1998, was the first unmanned, autonomous aircraft to fly the Atlantic Ocean
 Aerosonde/Monash University UAV 'Lawrence Hargrave' L-R : Dr Greg Holland, CEO, Aerosonde Ltd. (left) presents Aerosonde 'Lawrence Hargrave' to Prof. Mike Brisk (Dean, Fac. of Engineering) and Prof. Greg Egan (Head of Dept., Dept of Electrical and Computer Systems Engineering) Photo : Prof. John Bird
Wingspan: 2.9 m Wing Area: 54.88 dm sq Airfoil: SD7032 Mass: 6.7 kg Payload: 3 kg (for model regulations) Engine: Enya 155 (26cc) Fuel: 4 stroke (5 lt) Airspeed: 65 Kph (Cruise) 120 Kph (Max) Return to Menu
Team MonashProf. Gregory K. Egan BEng R.M.I.T MSc PhD Manc. FIEAust. CPEng SMIREE MACM MIEEE MBCSAerodynamics, Avionics, Autopilots, Telecommunications, RC Pilot
Prof. John Bird Dip.Art TTC
Mr Raymond J.V. Cooper
Mr Terry Cornall BSc (Hons) Melb MEngSc (Coursework & Minor Thesis)
Mr Paul Jenkins BE
Mr Stewart C. Jenvey DipElecEng DipElectronEng Caulfield I.T. BEng BAppSc Victoria I.C. MEng Chisholm I.T. MIEEE
Dr Andrew Price Ass.Dip (Electronics) Gordon Inst BEng R.M.I.T PhD Deakin Mr Ian Reynolds BE Avionics, RC Pilot
Assoc. Prof. David Suter BSc DipEd Flin. GradDipComp R.Melbourne I.T. PhD LaT. SMIEEE
Mr Brian Taylor Assoc. Dip. in Communications Engineering R.M.I.T and...
Dr Russell J.G. Naughton PhD R.M.I.T
All enquiries about this website should be directed to :
All enquiries about the Aerobotics@Monash program should be directed to : Return to Menu
Trials Archive2002
Nov. 28, 20022001
Nov. 15, 20012000
Jun. 2000 - May 20011999
Dec. 17, 1999Return to Menu
Papers Aerobotics at Monash University : Significance, Impact and Contribution to Australia's Economic Development
Technology
(The) Air Up There : CIRES Kites |
|
© Copyright 1999-2005 CTIE - All Rights Reserved - Caution
|