
|
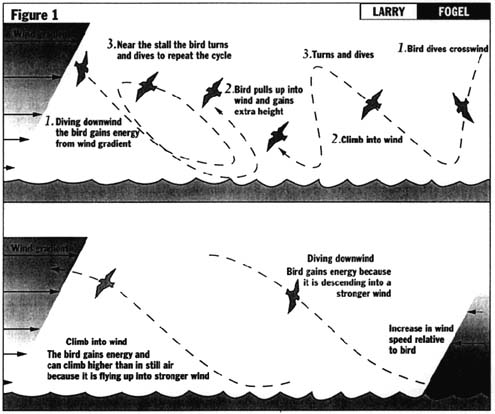
Dynamic Soaring?by Larry J. Fogel [ Reproduced with kind permission of S&E Modeler Magazine ]The challenge of demonstrating true radio-controlled dynamic soaring remains with us. The albatross and some other birds use dynamic soaring to achieve seemingly endless flight over the ocean without flapping their wings. When winds blow over water, the lower layers of air are slowed down by friction with the waves. As a result, a gradient of velocities is produced with the wind speed at its maximum at 100 feet or so above the surface. After an upward climb to about 100 feet (the birds) turn to face downward and enter a dive, gaining air speed on the way and covering considerable distance. At sea level they turn into the wind using their momentum to climb again into stronger winds, during which time they progressively lose speed. But this again is made up for by the gain in height necessary for the long downwind glide. Once they can climb no further, they turn about and the cycle is repeated. The first suggestion for a physical explanation of this apparent feat of levitation came from Lord Rayleigh, who proposed in 1883 the albatross extracts energy from the wind gradient. The albatross glides downwind, gaining groundspeed then turns sharply and heads up into the wind. Its groundspeed now falls off but, because it meets an increasing wind velocity as it climbs, its air speed now falls off, but because it meets an increasing wind velocity as it climbs, its air speed does not slow down so fast. In this way it regains it original height before its speed drops below its minimum gliding speed, then it can turn and repeat the manoeuvre. Figure 1 shows two patterns which are efficient ways of using the wind gradient for dynamic soaring. We now have a rather complete understanding of Dynamic Soaring, reference the attached bibliography.
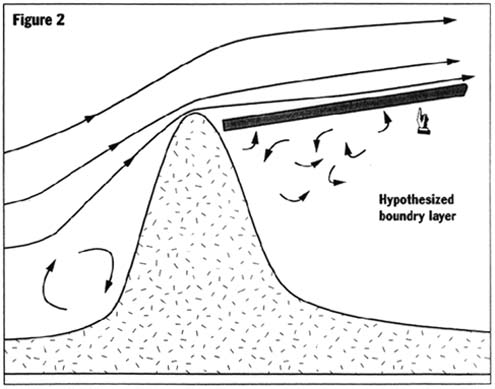
The video, Dynamic Soaring, produced by John Roe in support of our F3J team, is well worth watching. It includes soaring on both sides of the ridge, the claim being this is dynamic soaring. We are instructed that when wind meets a ridge, the air continues to rise after it passes over the top thereby forming a marked boundary layer below which there is only turbulence and no lift, see Figure 2.
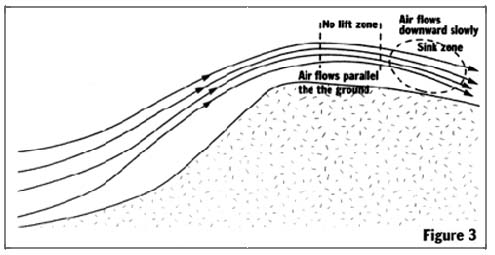
The radio-controlled gliders fly along a tilted circular path on the lee side crossing this boundary layer into the lift for a portion of this pattern, thereby extracting sufficient energy to remain aloft indefinitely. Now, by convention, the term boundary layer refers only to the shear that exists when a fluid passes over a surface. The boundary layer for aircraft is usually measured in millimetres. The boundary referred to in the video that separates the lift from the lower turbulence has no significant thickness and is rarely planar. The circular manoeuvre performed at high speed by these very efficient sailplanes is worth watching and I certainly applaud John's effort in support of our F3J team. However, let's look at what is happening more carefully. If the air moves slowly toward the ridge, there is little lift, minor turbulence at the very top, and the air generally follows down the lee side, see Figure 3.
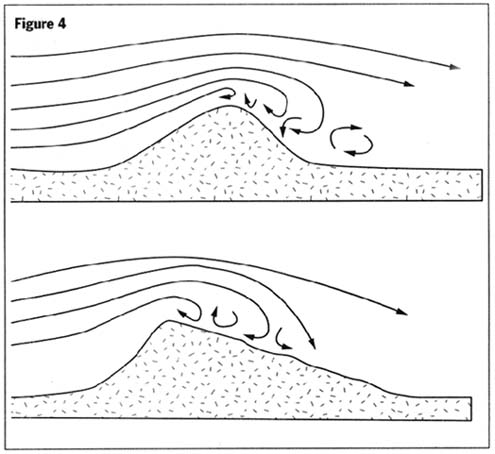
A stronger wind produces greater lift that continues past the ridge. The lower portion of this air descends creating a rotor that generates lift on the immediate lee side of the ridge, see Figure 4.
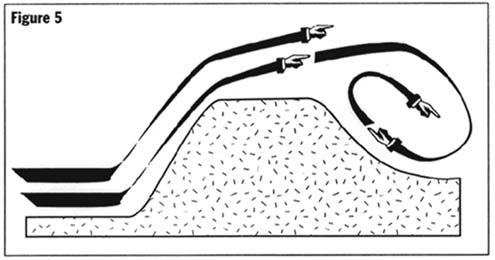
A clear picture of leeside lift is shown in Figure 5.
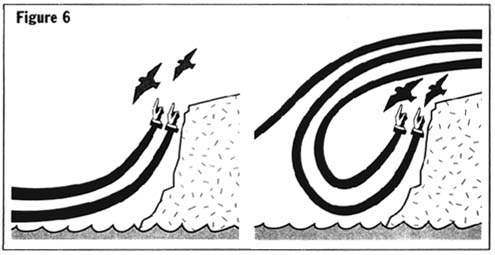
Even when the wind is offshore, currents of air will curl upward as the wind spills over the cliff's edge. Gulls and other seabirds take advantage of these updraughts, see Figure 6.
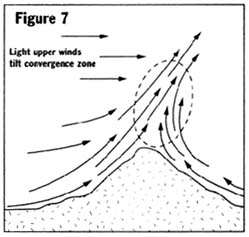
For example, when riding in a convertible you feel a strong wind on the back of your head from the generated rotor. Now the turbulence generated close to the top of the ridge spreads out downstream. There is no constant thickness planar boundary layer. Still stronger wind can produce secondary lift and undulating downstream air flow with separate rotors. And let's not forget the possibility of convergence that occurs when there is heating of the leeside or other uneven pressure distribution, see Figure 7.
There is no doubt that you can continually soar close to both side of a wind-swept ridge and I applaud the imagination and skill of those who have demonstrated this. But this does not answer the challenge of dynamic soaring (endless fixed-wing unpowered flight over a flat surface simply by extracting energy from the wind gradient). According to Piggott, In the early days of soaring there were many attempts at dynamic soaring in hill lift with varying degrees of success. The discovery of thermals and wave lift soon made the games possible in dynamic soaring so insignificant in comparison that almost all attempts were abandoned. However, now that glider performance has reached such a very high level that even the slightest game is a triumph, perhaps pilots and designers will take a new look at this interesting subject. It would not take much improvement to turn a gliding angle of 1:55 into no loss of height at all. We await a demonstration of true dynamic radio controlled soaring! Incidentally, I strongly recommend that you read the book by Piggott and view the Dynamic soaring video. If you want to discuss this video with John Roe he can be reached at 714-587-1179 or eMail: Sensei_John_Roe@compuserve.com
Additional ReferencesBurton, Robert, 1990, Bird Flight: An Illustrated Study of Birds' Aerial Mastery, Facts On File, Inc., New York, USA, pp.104-056Dalton, Stephen, 1977, The Miracle of Flight, McGraw Hill, New York, USA, pp.86-87 Gornick Jr., Alan, 1989, Basics of Radio Control Sailplanes, Air Age, Inc., Wilton, Connecticut, USA, Figs. 7-3 Hughes, Dave, 1977, Radio Control Soaring, Radio Control Publishing Company Ltd., England, p.12 and 65 Jameson, William, 1958, The Wandering Albatross, Rupert Hart-Davis, London, UK Klemperer, Wolfgang B., 1926, The Theory of Soaring Flight: Parts 4 & 6, Aerodynamical Institute at the Institute of Technology, Aachen Pagenn Dennis, 1976, Flying Conditions, Published by Dennis Pagen, State College Pennsylvania, USA pp.64-65 Piggott, Derek,1996, Understanding Gliding, The Principles of Soaring Flight, A&C Black LTD. London, Third Edition, pp.102-04 Rais-Rohani, Mascud, 1985, A Feasibility Study of Dynamic Soaring in the Jet Stream, A Thesis Submitted to the Faculty of Mississippi State University, Mississippi State, Mississippi, USA Sachs, Gottfried, Knoll, Alexander and Lesch, Klaus, 1989, Optimal Utilisation of Wind Energy for Dynamic Soaring, XXI OSTIV Congress, Weiner-Neustadt, Austria Terres, John K., 1968, How Birds Fly: Under the Water and Through the Air, Hawthorn Books, Inc., New York, USA Utgoff,Vadym V. and Johnson, Frederick G., 1976, Dynamic Soaring in the Atmospheric Boundary Layer: An Experimental Investigation, XV OSTIV Congress, Rayskala, Finland
|
© Copyright 1999 CTIE - All Rights Reserved - Caution |