The following para is the same as on the top of the current aerobotics home page
From here on THIS IS A DRAFTThe following text was taken from an eMail for GETo this end the group has tested the autopilot with an example of a robust and inexpensive Multiplex EasyStar that is typical of a number of aircraft in this class. The modifications required were minimal with the autopilot being installed in the cockpit cover. A brushless Hyperion motor was installed for these tests to give adequate power margin however the standard motor would give adequate performance as the autopilot has an all up mass of 105gm including all sensors and cabling. Test flights proved uneventful with no aircraft specific tuning of the autopilot being required. The specific tests conducted were for the aircraft to return to the launch point at safe altitude on simulated failsafe. It is our expectation that most model aircraft will come equipped with integrated autopilots, including GPS navigation (return to origin), and spread spectrum communications if only to ensure safe use of recreational aircraft by unskilled pilots - "litigation mitigation" if you will. These features will serve to contain aircraft to designated safe flying spaces and return them to the vicinity of the pilot should they for any reason stray out of radio range.
Multiplex EasyStar GalleryImages are 1000x750 pixels - reduced to 500pixels by code for page view : Final version will have small fast loading images for page view
 Prof Greg Egan ready to launch the EasyStar
 Prof Greg Egan launches the EasyStar for an 'out and return home' mission
Note: A line-of-sight mission for safety, pilot can switch back to R/C manual mode (pilot-in-command) at all times. Manual take-off and Landing (2 other stand-by MAAA insured pilot /observers nearby out of camera shot)
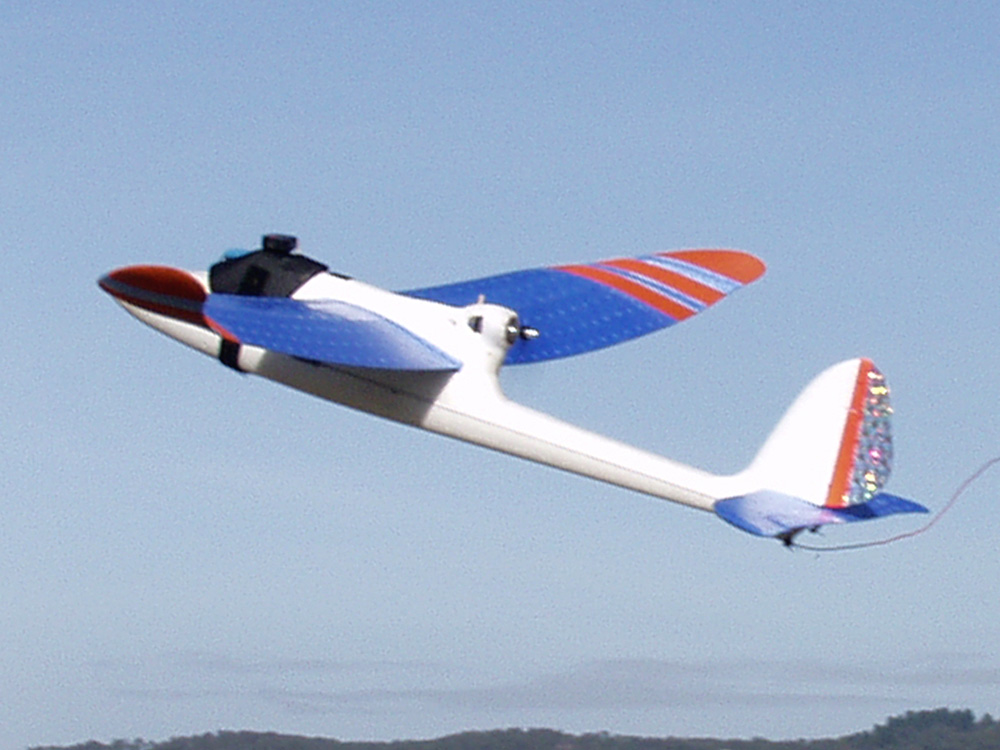 The EasyStar
 The EasyStar on the way to 'mission commence' way point and altitude
Russ Note: The only image I have of Roger Gibbs has Greg minus jumper and obviously on another day. This won't matter when I have all the pix up but here it jest don't work
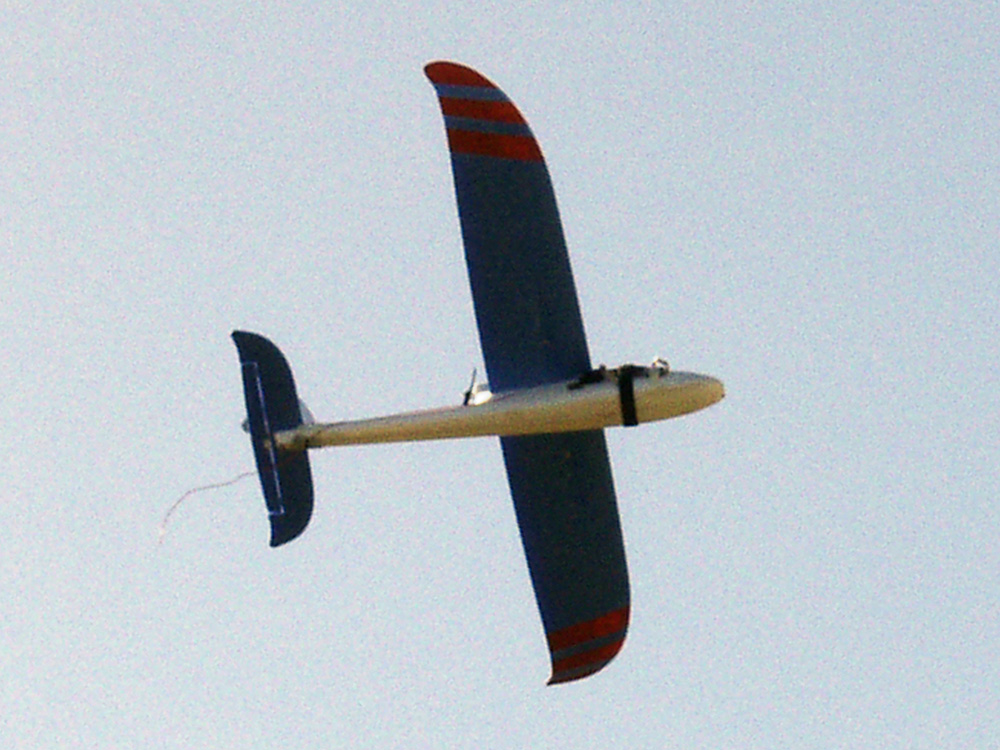 Back 'home' the EasyStar circles overhead - waiting for next command
 The EasyStar returns from its mission...landing
|